

Plukkautomatisering i industrilager: teknologier og utvalgsveiledning
 Bransjenyheter
Bransjenyheter
Plukkingen står for omtrent 55 % av de totale driftskostnadene for lageret – og i metallbearbeidings- og industrielle produksjonsmiljøer klatrer dette tallet ofte høyere. Plater i metall veier hundrevis av kilo. Rør og profiler spenner over flere meter. Standard plukkmetoder laget for distribusjon av forbruksvarer skaleres ganske enkelt ikke til disse materialene. Resultatet er langsom henting, skadet varelager og en arbeidskostnadsstruktur som vokser proporsjonalt med produksjonsvolumet.
Å velge automatisering bryter det forholdet. Ved å integrere automatisert henting, intelligente lagringssystemer og programvaredrevet lagerstyring, oppnår moderne fasiliteter reduksjoner i gjenhentingstid på opptil 70 %, samtidig som de forbedrer materialsporbarheten og reduserer ulykker på gulvnivå. Denne veiledningen dekker hvordan plukkautomatisering fungerer i industrielle omgivelser, teknologiene som gjør det mulig, og utvalgskriteriene som betyr mest i metall- og produksjonsmiljøer.
Hva plukkautomatisering faktisk betyr i industrielle lager
I konvensjonell lager, refererer plukking til prosessen med å lokalisere, hente og levere en spesifikk vare fra lager til en behandlingsstasjon eller ekspedisjonsområde. I et manuelt lager innebærer dette at en arbeider fysisk navigerer lagerganger, identifiserer den riktige varen og transporterer den – ofte med gaffeltruck eller kran – dit den er nødvendig. Hvert av disse trinnene introduserer tidskostnader, feilrisiko og fysisk belastning.
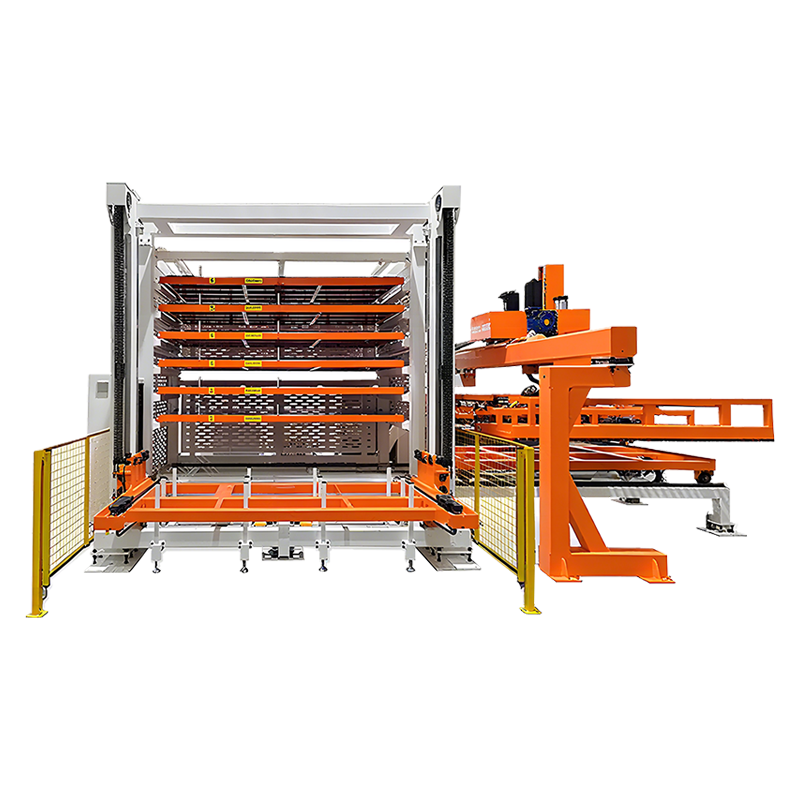
Plukkautomatisering erstatter eller supplerer de manuelle elementene i denne prosessen med mekaniske og programvaresystemer. I de mest komplette implementeringene mottar et lagerstyringssystem (WMS) en hentingsforespørsel, identifiserer den optimale lagringsplassen, sender en automatisert gjenfinningsmekanisme – en stablekran, portalrobot eller robotarm – og leverer varen til en fast laste- eller lossestasjon. Arbeideren mottar materialet uten å måtte søke, navigere eller håndtere tunge belastninger manuelt.
Den kritiske forskjellen for metalllagringsmiljøer er at plukkautomatikken her opererer på tunge, overdimensjonerte og ofte uregelmessige materialer - plateplater på opptil 3000 kg, rør opptil 12 meter lange, stenger og profiler med varierende tverrsnitt. Automatiseringssystemet må konstrueres spesifikt for disse lastegenskapene, ikke tilpasset fra systemer designet for palleterte forbruksvarer.
Kjerneteknologier i automatiserte plukkesystemer
Moderne plukkautomatisering i industrielle omgivelser kombinerer flere teknologilag. Hver har en egen rolle, og integreringen av dem bestemmer den generelle systemytelsen.
| Teknologi | Funksjon | Typisk bruk i metalllagring |
|---|---|---|
| Automatisert lagrings- og gjenfinningssystem (AS/RS) | Lagrer og henter gjenstander automatisk via stablekraner eller portalroboter | Plateplater, rørkassetter i vertikale tårnsystemer |
| Intelligent laste-/lossemanipulator | Robotarmer eller portalsystemer som overfører materialer mellom lagrings- og prosesslinjer | Mate laserkuttere, kantpresser og CNC-maskiner fra lager |
| Warehouse Management System (WMS) | Programvarelag som sporer inventar, planlegger valg og grensesnitt med ERP-systemer | Sanntidsslottildeling, materialsporbarhet, ordresekvensering |
| PLS og berøringsskjermkontroll | Driftskontrollgrensesnitt for lagrings- og gjenfinningskommandoer | Operatørinitiert henting med automatisk vektdeteksjon og sporbekreftelse |
| Transportbånd & AGV-integrasjon | Horisontal transport av materialer mellom lager og arbeidsstasjoner | Rullebaner for panelmating; AGV-er for overføring mellom avdelinger |
I praksis er den mest virkningsfulle enkeltteknologibeslutningen valget av lagringssystemarkitektur, siden det bestemmer hvilke gjenfinningsmekanismer som er mulige. A automatisert platelagringssystem med vertikal flerlagsstruktur og PLS-kontroll muliggjør henting av enkeltelementer uten å forstyrre tilstøtende inventar – en funksjon som manuelle eller halvautomatiske stativer ikke kan replikere.
Hvordan automatisert plukk forbedrer operasjonell ytelse
Ytelseskassen for plukkautomatisering i industriell metalllagring er bygget på fire målbare dimensjoner: hastighet, nøyaktighet, plasseffektivitet og sikkerhet.
- Innhentingshastighet: Automatiserte hentesystemer reduserer plukkesyklustidene med 50–70 % sammenlignet med manuelle operasjoner. En stablekran eller portalrobot kan lokalisere og levere et spesifikt ark eller rørkassett på sekunder – en oppgave som krever en gaffeltruckfører flere minutter med navigering og posisjonering i et konvensjonelt stativsystem. For produksjonslinjer der materialforsinkelser oversetter direkte til maskinstans, har denne hastighetsforskjellen direkte kostnadsimplikasjoner.
- Velg nøyaktighet: Automatiserte lagringssystemer med WMS-integrasjon oppnår plukkenøyaktighet over 99 %. Hver lagringsplass er digitalt tilordnet og bekreftet ved henting, og eliminerer feilidentifikasjonsfeilene som er vanlige i manuelle operasjoner på tvers av anlegg med høye SKU-teller eller lignende materialtyper. Dette er spesielt relevant i metallbearbeiding, der en blanding mellom materialkvaliteter - bløtt stål mot rustfritt, standard versus høy styrke - kan forårsake kvalitetssvikt nedstrøms.
- Plassutnyttelse: Vertikale automatiserte lagringssystemer gjenvinner gulvplass som manuelle stativkonfigurasjoner ikke kan. AS/RS-løsninger har vist seg å redusere fotavtrykket som kreves for tilsvarende lagringskapasitet med opptil 85 % sammenlignet med gulvstablede eller konvensjonelle utkragingsarrangementer. I anlegg der eiendom er begrenset, muliggjør denne romlige effektiviteten direkte utvidelse av produksjonskapasiteten uten utvidelse av bygningen.
- Sikkerhet på arbeidsplassen: Å fjerne arbeidere fra tunge manuelle håndteringsoppgaver – og fra gangene der gaffeltrucker og kranbevegelser skjer – reduserer målbart ulykkesfrekvensen. Intelligente laste- og lossemanipulatorer utstyrt med presisjonssensorer håndterer materialoverføring mellom lagrings- og prosessutstyr uten menneskelig innblanding i faresonen.
Plukkautomatisering for lange materialer: rør, profiler og stenger
Lange materialer byr på et spesifikt sett med automatiseringsutfordringer for plukking. Lengden deres - ofte 6 til 12 meter - gjør standard AS/RS-tårndesign uanvendelig. Deres vektfordeling er asymmetrisk. Og henting av dem krever vanligvis tilgang fra enden i stedet for forsiden av lagringsenheten.
Spesialbygde automatiserte systemer for lange materialer adresserer disse begrensningene gjennom utkragede eller kassettbaserte arkitekturer med motoriserte gjenfinningsmekanismer. A langt materialoppbevaringsstativ med automatisk henting lagrer rør, stenger og profiler i dedikerte kassetter eller utkragerbrønner, med en stablekran eller servodrevet arm som leverer den valgte kassetten til en fast losseposisjon. Dette eliminerer behovet for en gaffeltruckfører til å navigere inn i tette stativganger for å trekke ut en spesifikk rørlengde - en vanlig kilde til både forsinkelser og skader i konvensjonell rørlagring.
WMS-integrasjon i disse systemene muliggjør ytterligere intelligens: sporing av materialkvaliteter, varmetall, lengder og overflateforhold per kassett; generere automatiske plukklister for operasjoner i lengde; og gi produksjonsplanleggingssystemer med sanntids inventardata som forhindrer materialmangel i å stoppe produksjonen.
Integrering av automatisert plukking med produksjonslinjer
Den fulle verdien av plukkautomatisering realiseres når lagringssystemet integreres direkte med nedstrøms prosessutstyr i stedet for å drives som en frittstående gjenfinningsfunksjon. I metallbearbeidingsmiljøer betyr dette å koble det automatiserte lagringssystemet til laserkuttere, plasmabord, kantpresser og stansemaskiner slik at materialmating blir en kontinuerlig, systemstyrt prosess i stedet for en serie manuelle inngrep.
A fullt integrert automatisert lagrings- og gjenfinningssystem (AS/RS) kan motta en produksjonsordre fra et ERP- eller MES-system, identifisere det nødvendige materialet i WMS, sende uthentingsmekanismen og levere arket eller røret til maskinens lastesone – alt uten operatørens involvering i materialstrømmen. Operatørens rolle skifter fra fysisk håndtering til kvalitetsverifisering og unntakshåndtering.
Denne integrasjonsmodellen muliggjør også just-in-time materiallevering til produksjonsceller: i stedet for å forhåndsfase store mengder materiale på maskinsiden (som bruker gulvplass og skaper håndteringsrisiko), leverer det automatiserte systemet materiale i den rekkefølgen og timingen som er diktert av produksjonsplanen. Fasiliteter som implementerer denne tilnærmingen rapporterer betydelige reduksjoner i inventar under arbeid og ledig tid på maskinen.
Evaluering av en investering i plukkautomatisering: nøkkelkriterier
Å velge det riktige automatiserte plukkesystemet for et industrielt metalllagringsmiljø innebærer å tilpasse systemspesifikasjonene til operasjonelle realiteter. Fire faktorer styrer beslutningen.
- Materialegenskaper: Vekt per enhet, maksimale dimensjoner (arkstørrelse eller rørlengde), nødvendig lagringskapasitet etter materialtype og gjenfinningsfrekvens bestemmer hvilken lagringsarkitektur og gjenfinningsmekanisme som er passende. Systemer vurdert for 3000 kg per kassett med 6 meter lange profiler har fundamentalt andre tekniske krav enn de som betjener en lett platefremstillingsoperasjon.
- Krav til produksjonsintegrasjon: Hvis systemet trenger å mate en laserskjærer eller CNC-maskin direkte, må lossestasjonens posisjon, transportbåndgrensesnittet og uthentingssyklustiden konstrueres for å matche maskinens matehastighet. Frittstående lagringssystemer som leverer til et generelt oppstillingsområde har andre spesifikasjoner enn produksjonsintegrerte systemer.
- WMS og ERP-kompatibilitet: Kontroller om systemets programvareplattform integreres med eksisterende ERP-, MES- eller produksjonsplanleggingssystemer. Verdien av inventarsporbarhet og automatisert plukklistegenerering avhenger helt av sanntidsdatautveksling mellom systemer. Be om dokumentasjon på eksisterende integrasjonsprotokoller og referanseinstallasjoner.
- Skalerbarhet og modularitet: Driftskrav endres. Et system designet for å utvides – ved å legge til lagringsnivåer, øke kassettkapasiteten eller integrere flere automatiseringsmoduler – bevarer den første kapitalinvesteringen etter hvert som virksomheten vokser. Proprietære arkitekturer som ikke kan utvides skaper langsiktige begrensninger.
For en omfattende oversikt over tilgjengelige løsninger på tvers av metallplater, lange materialer og helautomatiserte lagringskategorier, utforske komplett produktsortiment for intelligent lagring , med teknisk konsultasjon tilgjengelig for å vurdere hvilken konfigurasjon som passer anleggets spesifikke materialflyt og produksjonskrav. Det globale lagerautomatiseringsmarkedet – for tiden verdsatt til nesten 30 milliarder dollar – gjenspeiler omfanget der industrielle operasjoner allerede gjør denne overgangen, med stykplukkingsroboter anslår å vokse med 15,27 % CAGR gjennom 2031 ettersom integrasjon med produksjonslinjer blir dypere på tvers av sektorer.





Hvis du er interessert i våre produkter, vennligst kontakt oss
PRODUKTER
NYHETSSENTER
MOBILTERMINAL

KONTAKT OSS
- ADRESSE: Rom 205, kontorbygning, Shandong Yurui Machinery Group Co., Ltd., i skjæringspunktet mellom Banqiao Road og Huangjin Road, Pingyi Street, Pingyi County, Linyi City, Shandong-provinsen.
- TELEFON: +86-19819101584
- E-POST: [email protected]
Linyi Yocho Storage Intelligent Manufacturing Co.,Ltd. ALLE RETTIGHETER FORBEHOLDT. ALLE RESERVERT. Produsenter av lagerstativ Lagerhyllefabrikk
